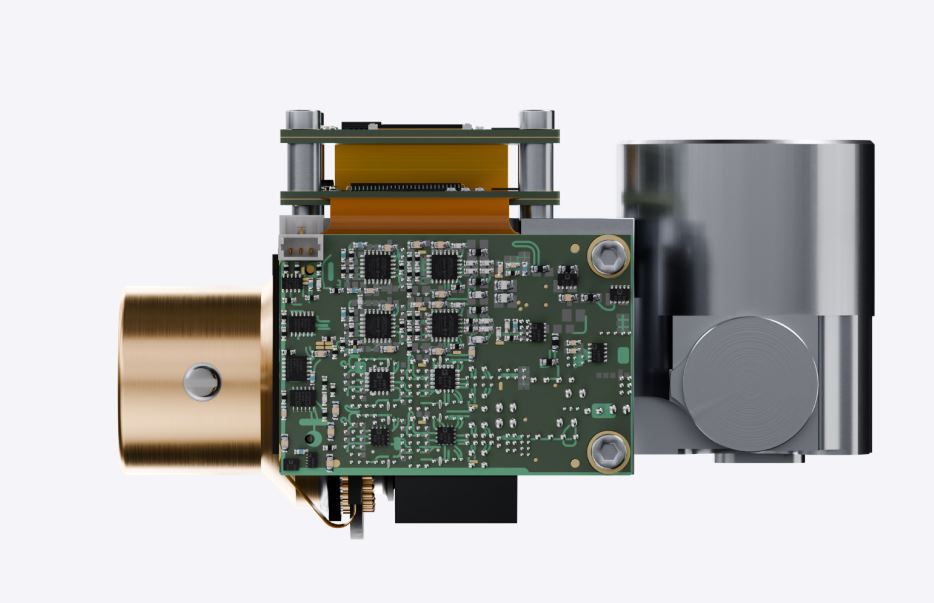
Matrix Vision’s rc_visard 3D camera family and rc_reason software suite was developed for stationary and mobile robot applications. Using an on-board processor, camera data can be processed directly and task-relevant information, such as gripping points, can be passed directly to the robot application. For specific tasks, rc_reason offers intelligent tools, with which, among other things, pick&drop applications can be realized without training individual objects. For accurate pick&place applications, a gripping point determination can also be performed based on CAD data. The 3D cameras are available with two base distances (65 and 160mm), two focal lengths and capture up to 1.2 million 3D data points. Depending on the resolution, point clouds can be generated with a frequency of up to 25Hz.